ZED-F9Pを用いた安価なRTK基地局の作製 その4
まず、問題となるのが基地局となる場所の正確な位置を測位することです。
と、いうのもRTKでの測位では基地局があるのが前提です。なので近くに利用できる基地局が無い場合に正確な測位には時間がかかります。最悪収束できない。
幸いにして私が基地局を設置するにあたりディーラーのNtripCasterが使えたので問題はなかったのです。
善意の基準局で運良く近くにあればよいのですが無い場合はどうしたら?
ディーラーに相談して借りるかかホクレンRTKを使えばできる。
どちらもタダってわけには行かないと思いますが…。
正確な座標の求め方
1.アンテナの設置
見通しの良い(オープンスカイ)な場所を選定。
ケーブル長は10m程度としておく。TNC-SMA、SMA-u.FLでZED-F9Pと接続。
2.PCにu-Centerをインストール
USB-C でZED-F9Pと接続するとCOMポートとして認識。
3.ZED-F9Pの設定
u-CenterにてCOMを選択して接続。
ツールバーから [Receiver]-[Action]-[Revert Config]で工場出荷状態。
この時点で衛星からのデータが正常に受信していることが別る。
COMポートのBaudrateを115200に。
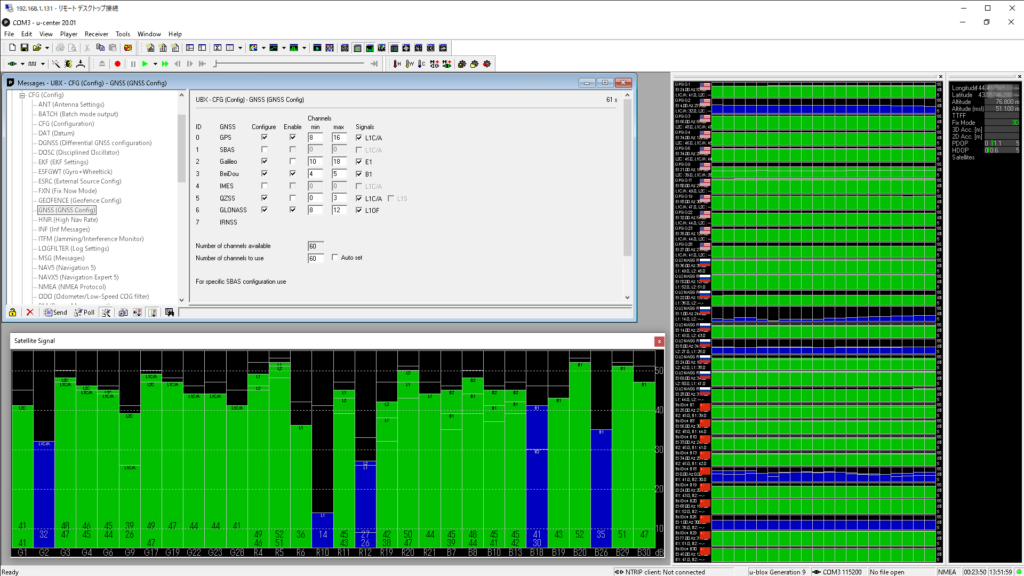
[View]-[Message-View]で設定ツールを起動
[CFG]-[GNSS]で使用するGNSSの設定。GPS、BeiDou、GLONASSをEnableにしてSend。
[CFG]-[MSG]のMessageコンボボックスでUSBに出力するデータを指定。
[02-15 RXM-RAWX]のUSBにチェック Send。
[02-13 RXM-SFRBX]のUSBにチェック Send。
ツールバーから [Receiver]-[Action]-[Save Config]
これで測位に必要なu-bloxの生データがUSBに出力される。
Disconnect。u-Centerの終了。
4.RTKLIBでの測位
rtknavi.exeをクリックして起動。
インプットストリームの設定。右上「I」をクリックして設定画面。
Roverにチェック Serial を選択。Optで通信速度115200。Format u-bloxを選択。
BaseStationにチェック、NTRIP Clientを選択。OptでNtripCasterのアドレス、ポート、マウントポイントなど設定。FormatでRTCM3など。
基地局によってはTransmit NMEA GPGGA Base Stationが必要な場合も。
これはクライアントの位置情報が必要な場合。疑似基地局を作成するディーラーのNtripCasterでは必要だった。ウソでない程度に緯度経度高度を入力。
「Options」ボタンでオプションメニュー。
Setting1タブ
[PostioningMode] Kinematic
[Frequences] L1+L2
使用衛星の[GPS][GLO][BeiDou]にチェック。
Setteing2
[Integer Ambiguityu Res] Fix and Hold、Fix and Hold、ONを選択
Positionsタブ
[BaseStation] RTCM AntennaPositionを選択
その他40db以上の感度のみ使うや15度以上の衛星を使うとかのオプションがあるが割愛。
「Start」ボタンでRTK測位開始。
動画を見てもらうとわかるが30秒かからずにFIXする。
基地局までの距離は数mというアドバンテージがありますが。
緯度/経度は43.xxxxxxxx と小数点以下8桁。
高度は小数点以下3桁。
FIX後は1~2cmの誤差。
ちなみにクルマに積んで計測してみたらFIX後は正確に位置を捕捉できていた。